Benjamin Aziel
Home
Selected Projects
Coursework
Contact Info
Selected Projects
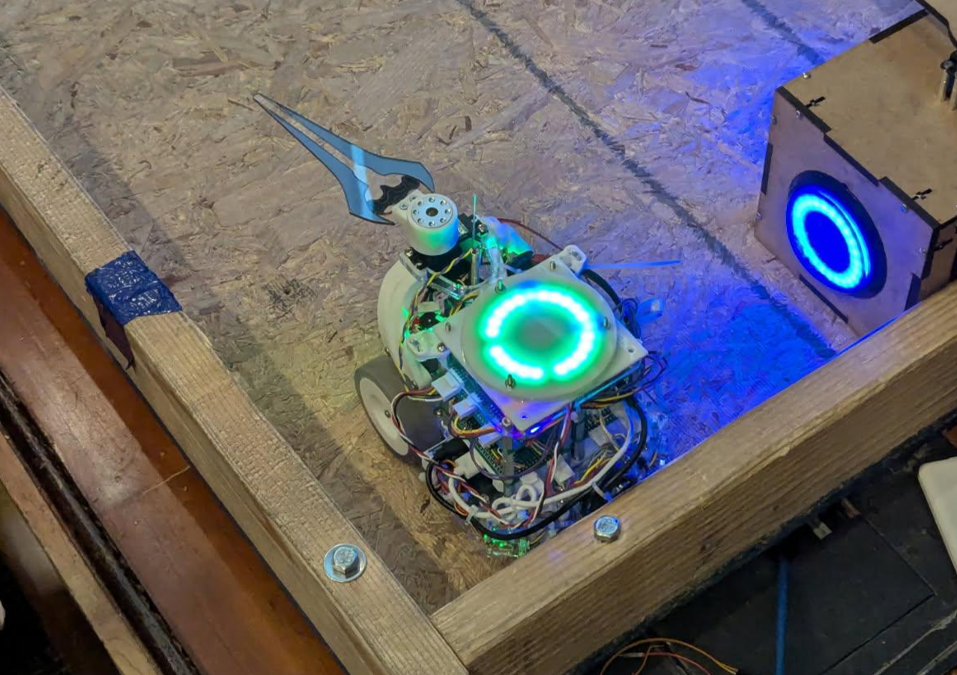
Compact Mobile Battle Robot
As part of a team of four engineers (Solomon Gonzalez, Pyo Lim, Cole Nagata, and myself), we designed and built a compact mobile robot for a competitive robot battle arena…
Diffusion-Based Trajectory Generation in Maze Environments
Trajectory planning in cluttered environments is traditionally framed as a search or optimization problem. Given a map, a start, and a goal, classical planners explicitly…
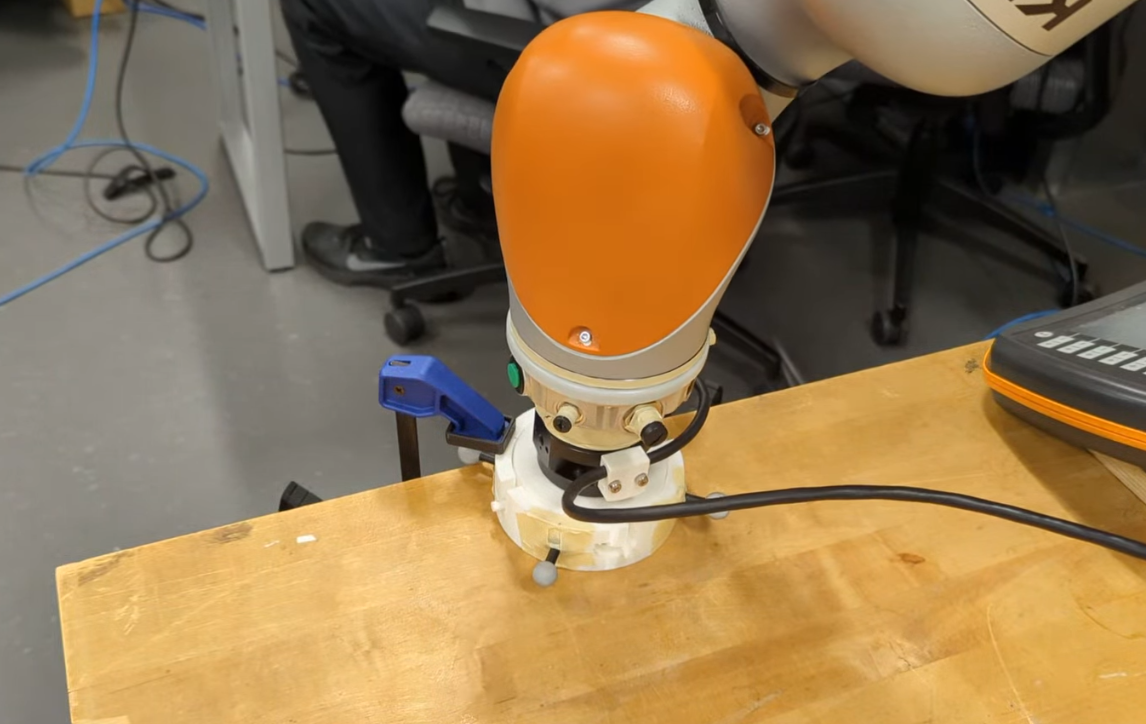
Implementation of Operational Space Control Barrier Functions on Franka Manipulator
Together with Mateusz Jaszczuk, I implemented a safety-critical control framework that integrates control barrier functions (CBFs) into an operational space controller for a…
Passive SE(3) Energy Tank Control for Contact-Rich Manipulation
This project develops a controller that guarantees passivity for six degree of freedom robotic motion in contact rich environments. The work extends the concept of energy…
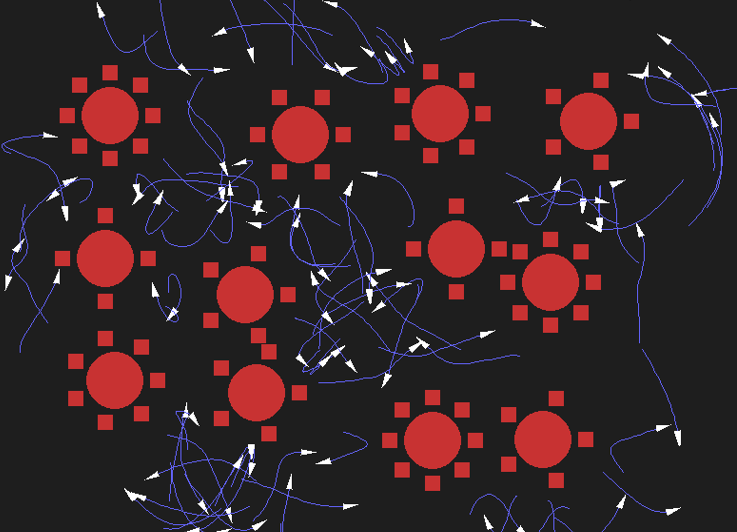
Performance Analysis of Boids for Coverage
This work, conducted in collaboration with Jason Chen, investigates the use of Reynolds-style boids as a distributed coverage algorithm. We formalized the canonical…
Vision-Guided Pick-and-Place with a 7DoF Robotic Arm
Together with Solomon Gonzalez, Mateusz Jaszczuk, and Andrik Puentes, we developed a robotic system that could autonomously detect, grasp, and stack blocks in both static…
No matching items