Comparison of LQG and LQR Controllers for Uncertain Satellite Model
In this project, I undertook a comprehensive analysis comparing Linear Quadratic Gaussian (LQG) and Linear Quadratic Regulator (LQR) controllers for managing uncertainty in a satellite model. The primary objective was to evaluate the performance of these control strategies in stabilizing the system under varying conditions of noise and disturbance.
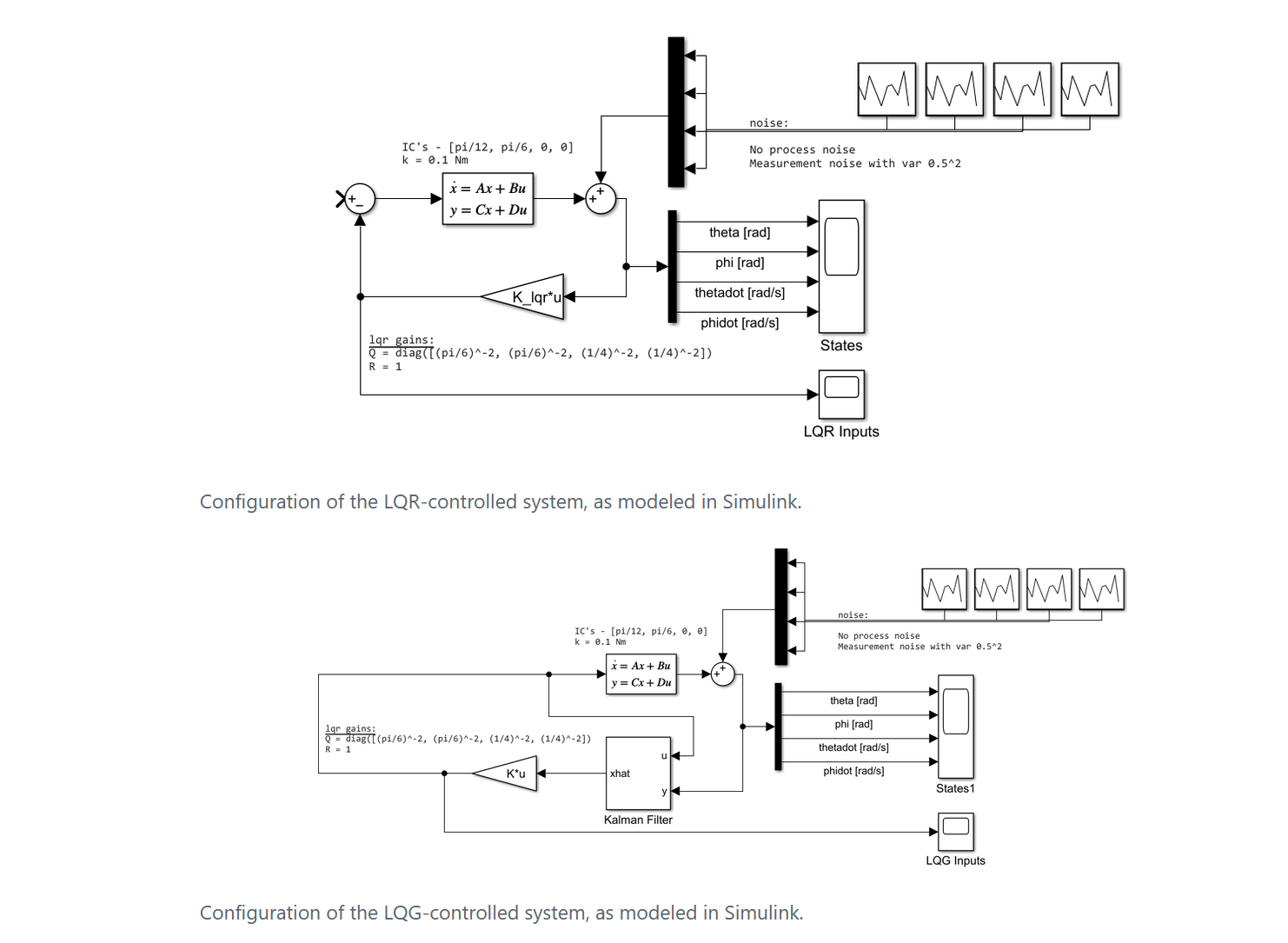
I designed both LQR and LQG controllers based on state-space representations of the satellite dynamics. The LQR controller aimed to minimize a cost function related to state deviations and control effort, while the LQG controller combined state estimation using Kalman filtering to account for process and measurement noise. I developed simulations to test the controllers under different scenarios, incorporating system uncertainties and external disturbances. The simulations included various noise profiles to replicate realistic conditions, allowing for a robust performance assessment. Key performance metrics were defined, including settling time, overshoot, and steady-state error, to quantitatively evaluate the effectiveness of each control method.
A report on the project can be found here: Comparison of LQG and LQR Controllers for Uncertain Satellite Model